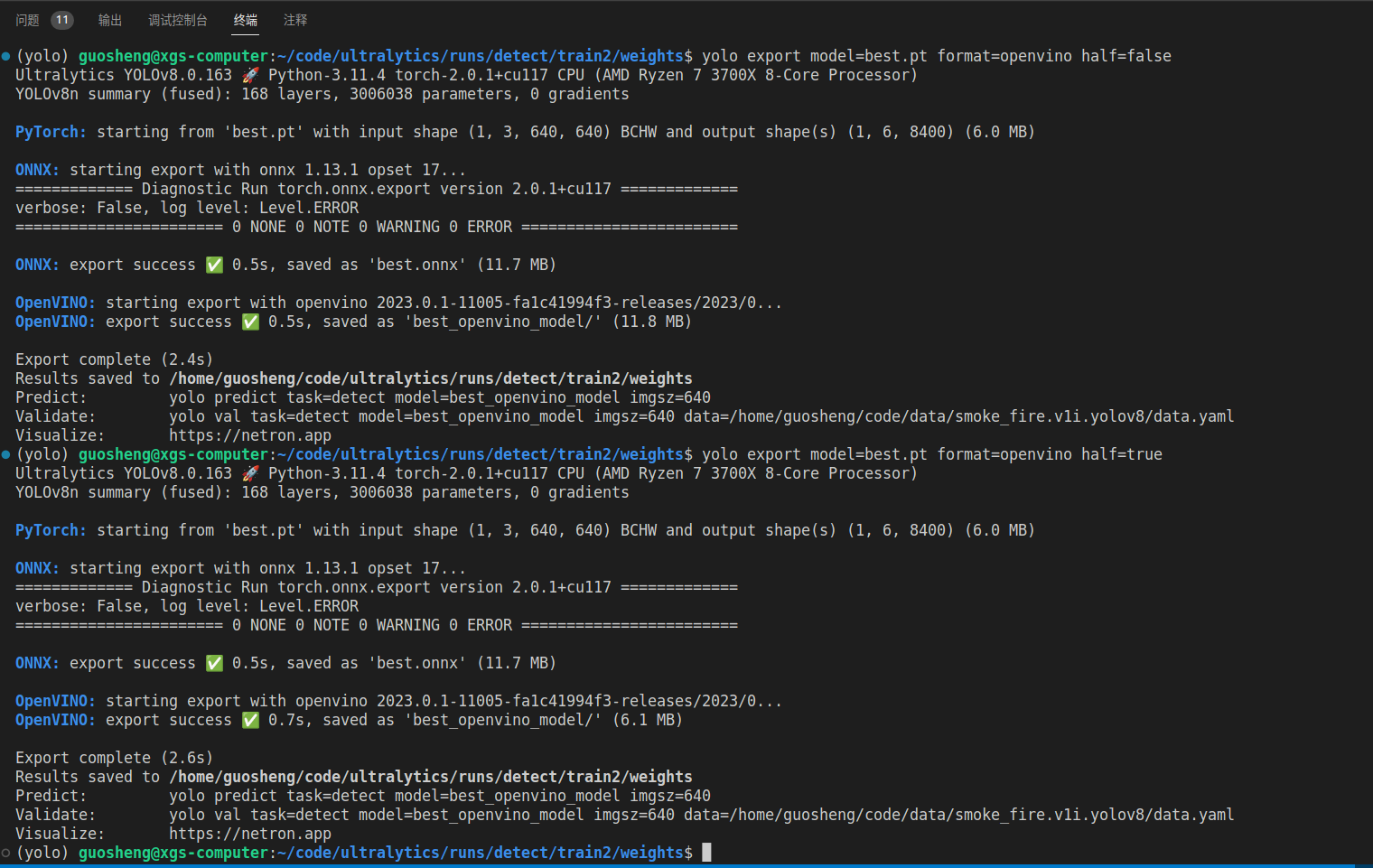
转化的时候有一个小插曲,缺失onnx,直接安装即可
conda install onnx=1.13 pip install openvino-dev途中可以看出,半精度的转化更慢一些,需要进行量化,把以前的fp32的数据压缩成fp16,需要用到各种数据统计的算法,所以耗时更多,但是由于模型本身很小,所以感受的不是很直观,整体加了0.2s,另外就是,整个流程其实是两个步骤,先转成onnx,然后转成了openvino的模型,也是大部分模型量化中转的方案,模型的大小基本上是压缩成一半左右,精度掉点相对较少,具体可以实际测试
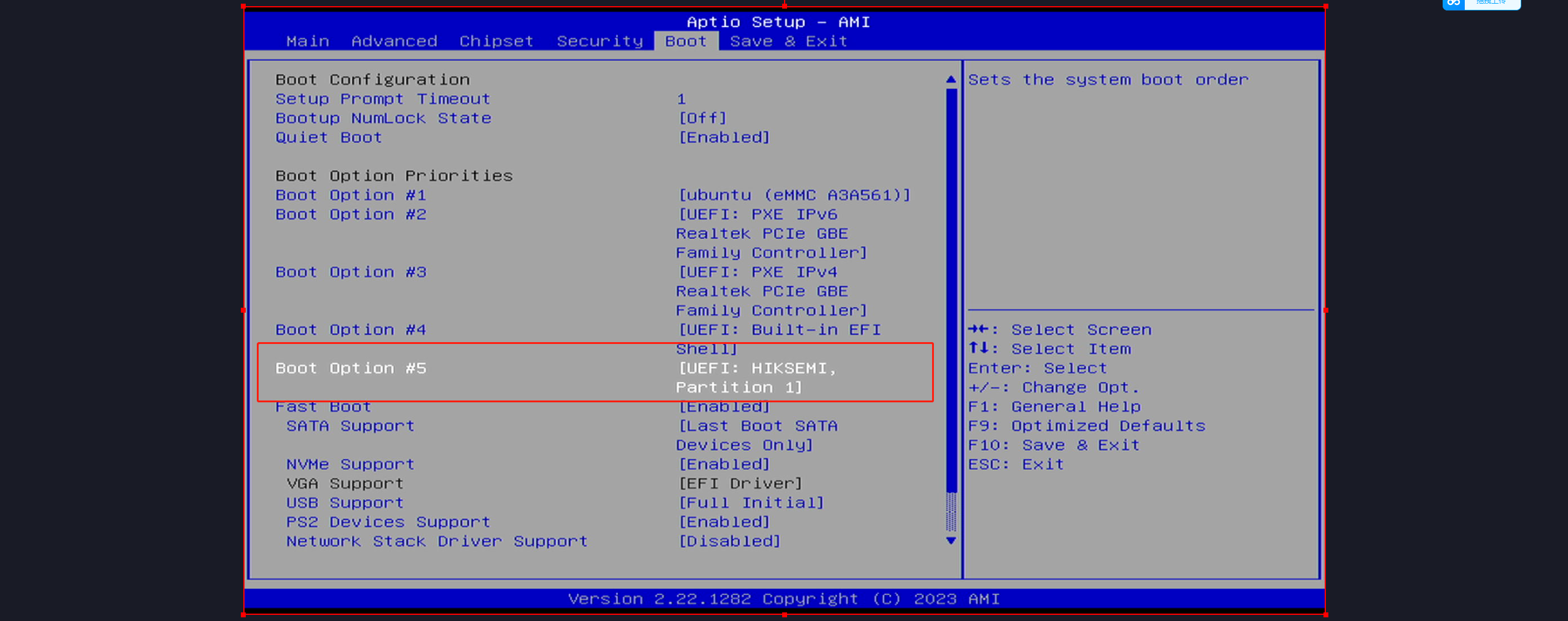
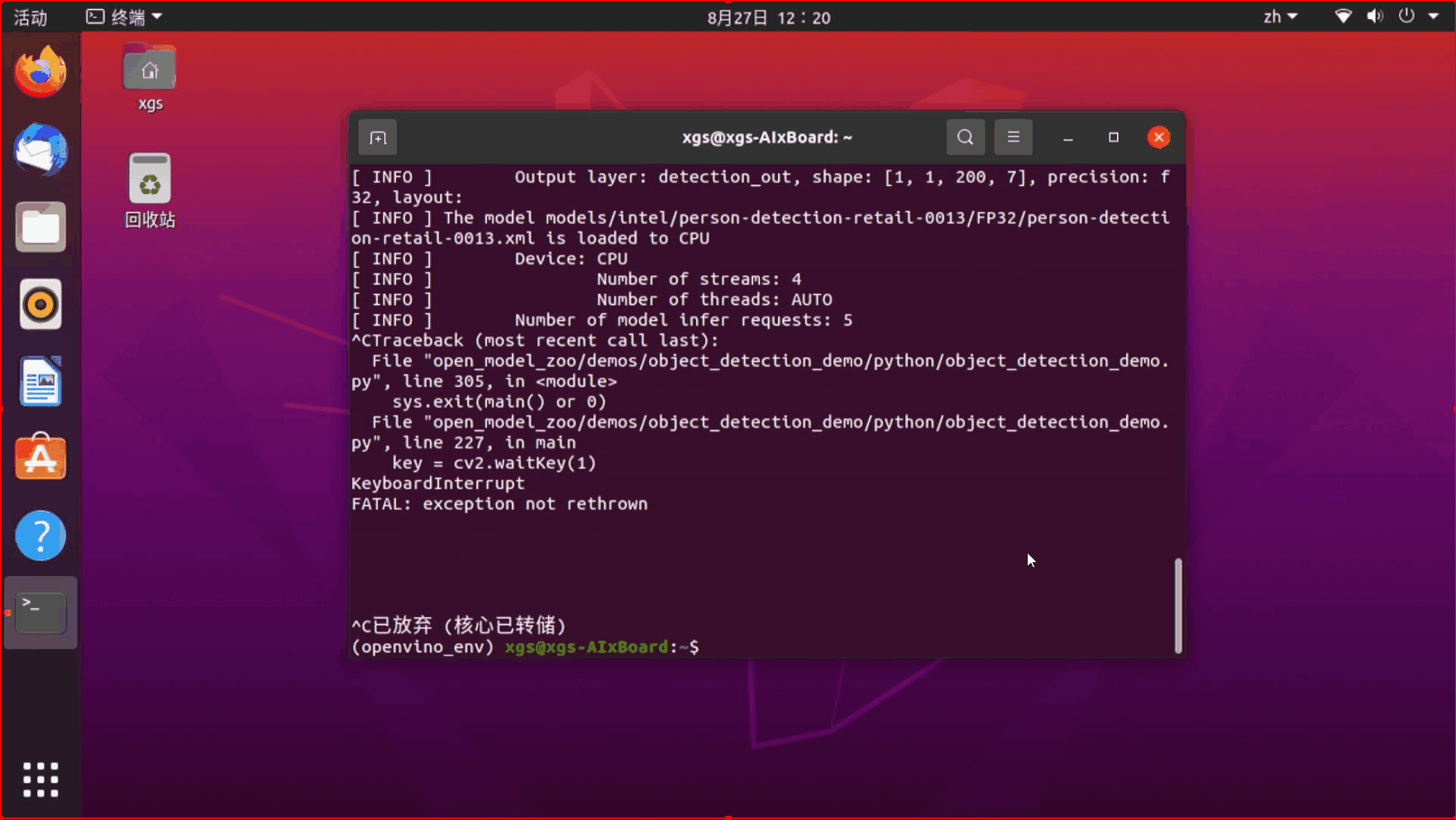
上板部署:
from openvino.runtime import Core, Model
import numpy as np
import cv2
import numpy as np
from PIL import Image
from typing import Tuple
import time
IMAGE_PATH = '/home/xgs/**oke_fire/weight***est_openvino_model/110.jpg'
core = Core()
det_model_path = '/home/xgs/**oke_fire/weight***est_openvino_model/best.xml'
det_ov_model = core.read_model(det_model_path)
if not "CPU":
det_ov_model.reshape({0: [1, 3, 640, 640]})
det_compiled_model = core.compile_model(det_ov_model, 'GPU')
color_palette = np.random.uniform(0, 255, size=(2, 3))
result_classes = ['fire','**oke']
img_width =640
img_height=640
def preprocess_image(img0: np.ndarray):
"""
Preprocess image according to YOLOv8 input requirements.
Takes image in np.array format, resizes it to specific size using letterbox resize and changes data layout from HWC to CHW.
Parameters:
img0 (np.ndarray): image for preprocessing
Returns:
img (np.ndarray): image after preprocessing
"""
# resize
img = letterbox(img0)[0]
# Convert HWC to CHW
img = img.transpose(2, 0, 1)
img = np.ascontiguousarray(img)
return img
def image_to_tensor(image:np.ndarray):
"""
Preprocess image according to YOLOv8 input requirements.
Takes image in np.array format, resizes it to specific size using letterbox resize and changes data layout from HWC to CHW.
Parameters:
img (np.ndarray): image for preprocessing
Returns:
input_tensor (np.ndarray): input tensor in NCHW format with float32 values in [0, 1] range
"""
input_tensor = image.astype(np.float32) # uint8 to fp32
input_tensor /= 255.0 # 0 - 255 to 0.0 - 1.0
# add batch dimension
if input_tensor.ndim == 3:
input_tensor = np.expand_dims(input_tensor, 0)
return input_tensor
def letterbox(img: np.ndarray, new_shape:Tuple[int, int] = (640, 640), color:Tuple[int, int, int] = (114, 114, 114), auto:bool = False, scale_fill:bool = False, scaleup:bool = False, stride:int = 32):
"""
Resize image and padding for detection. Takes image as input,
resizes image to fit into new shape with saving original aspect ratio and pads it to meet stride-multiple constraints
Parameters:
img (np.ndarray): image for preprocessing
new_shape (Tuple(int, int)): image size after preprocessing in format [height, width]
color (Tuple(int, int, int)): color for filling padded area
auto (bool): use dynamic input size, only padding for stride constrins applied
scale_fill (bool): scale image to fill new_shape
scaleup (bool): allow scale image if it is lower then desired input size, can affect model accuracy
stride (int): input padding stride
Returns:
img (np.ndarray): image after preprocessing
ratio (Tuple(float, float)): hight and width scaling ratio
padding_size (Tuple(int, int)): height and width padding size
"""
# Resize and pad image while meeting stride-multiple constraints
shape = img.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
if not scaleup: # only scale down, do not scale up (for better test mAP)
r = min(r, 1.0)
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
elif scale_fill: # stretch
dw, dh = 0.0, 0.0
new_unpad = (new_shape[1], new_shape[0])
ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return img, ratio, (dw, dh)
def draw_detections( img, box, score, class_id):
"""
Draw***ounding boxes and labels on the input image based on the detected objects.
Args:
img: The input image to draw detections on.
box: Detected bounding box.
score: Corresponding detection score.
class_id: Class ID for the detected object.
Returns:
None
"""
# Extract the coordinates of the bounding box
x1, y1, w, h = box
# Retrieve the color for the class ID
color = color_palette[class_id]
# Draw the bounding box on the image
cv2.rectangle(img, (int(x1), int(y1)), (int(x1 + w), int(y1 + h)), color, 2)
# Create the label text with class name and score
label = f'{result_classes[class_id]}: {score:.2f}'
# Calculate the dimensions of the label text
(label_width, label_height), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
# Calculate the position of the label text
label_x = x1
label_y = y1 - 10 if y1 - 10 > label_height else y1 + 10
# Draw a filled rectangle as the background for the label text
cv2.rectangle(img, (label_x, label_y - label_height), (label_x + label_width, label_y + label_height), color,
cv2.FILLED)
# Draw the label text on the image
cv2.putText(img, label, (label_x, label_y), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0), 1, cv2.LINE_AA)
def postprocess( input_image, output):
# detections = postprocess(pred_boxe***oxes, input_hw=input_hw, orig_img=image, pred_mask***asks)
"""
Performs post-processing on the model's output to extract bounding boxes, scores, and class IDs.
Args:
input_image (numpy.ndarray): The input image.
output (numpy.ndarray): The output of the model.
Returns:
numpy.ndarray: The input image with detections drawn on it.
"""
# Transpose and squeeze the output to match the expected shape
outputs = np.transpose(np.squeeze(output[0]))
# Get the number of rows in the outputs array
rows = outputs.shape[0]
# Lists to store the bounding boxes, scores, and class IDs of the detections
boxes = []
scores = []
class_ids = []
# Calculate the scaling factors for the bounding box coordinates
x_factor = 1
y_factor = 1
# Iterate over each row in the outputs array
for i in range(rows):
# Extract the class scores from the current row
classes_scores = outputs[i][4:]
# Find the maximum score among the class scores
max_score = np.amax(classes_scores)
# If the maximum score is above the confidence threshold
if max_score >= 0.3:
# Get the class ID with the highest score
class_id = np.argmax(classes_scores)
# Extract the bounding box coordinates from the current row
x, y, w, h = outputs[i][0], outputs[i][1], outputs[i][2], outputs[i][3]
# Calculate the scaled coordinates of the bounding box
left = int((x - w / 2) * x_factor)
top = int((y - h / 2) * y_factor)
width = int(w * x_factor)
height = int(h * y_factor)
# Add the class ID, score, and box coordinates to the respective lists
class_ids.append(class_id)
scores.append(max_score)
boxes.append([left, top, width, height])
# Apply non-maximum suppression to filter out overlapping bounding boxes
indices = cv2.dnn.NMSBoxe***oxes, scores, 0.3, 0.45)
# Iterate over the selected indices after non-maximum suppression
for i in indices:
# Get the box, score, and class ID corresponding to the index
box = boxes[i]
score = scores[i]
class_id = class_ids[i]
# Draw the detection on the input image
draw_detections(input_image, box, score, class_id)
# Return the modified input image
return input_image
def detect(image:np.ndarray, model:Model):
"""
OpenVINO YOLOv8 model inference function. Preprocess image, run***odel inference and postprocess results using NMS.
Parameters:
image (np.ndarray): input image.
model (Model): OpenVINO compiled model.
Returns:
detections (np.ndarray): detected boxes in format [x1, y1, x2, y2, score, label]
"""
num_outputs = len(model.outputs)
preprocessed_image = preprocess_image(image)
input_tensor = image_to_tensor(preprocessed_image)
result = model(input_tensor)
boxes = result[model.output(0)]
detections = postprocess(image,result )
# detections = postprocess(pred_boxe***oxes, input_hw=input_hw, orig_img=image, pred_mask***asks)
return detections
# sing image_infernce
# input_image = np.array(Image.open(IMAGE_PATH))
# img = detect(input_image, det_compiled_model)
# img = cv2.cvtColor(img,cv2.COLOR_RGB2BGR)
# cv2.imwrite("img.jpg",img)
# video infernce
# 打开视频
video_capture = cv2.VideoCapture('/home/xgs/110.mp4') # 替换为您的视频文件路径
# 检查视频是否成功打开
if not video_capture.isOpened():
print("无法打开视频文件")
exit()
# 获取视频的帧率
fps = int(video_capture.get(cv2.CAP_PROP_FPS))
while True:
# 记录图像处理开始时间
start_time = time.time()
# 逐帧读取视频
ret, frame = video_capture.read()
img = cv2.cvtColor(frame,cv2.COLOR_RGB2BGR)
# 如果视频结束或无法读取帧,退出循环
if not ret:
break
# 在这里可以对每一帧进行处理,例如显示、保存或进行分析
# 例如,将每一帧显示在一个窗口中
img = detect(img, det_compiled_model)
img = cv2.cvtColor(img,cv2.COLOR_RGB2BGR)
# 计算图像处理时间
end_time = time.time()
processing_time = end_time - start_time
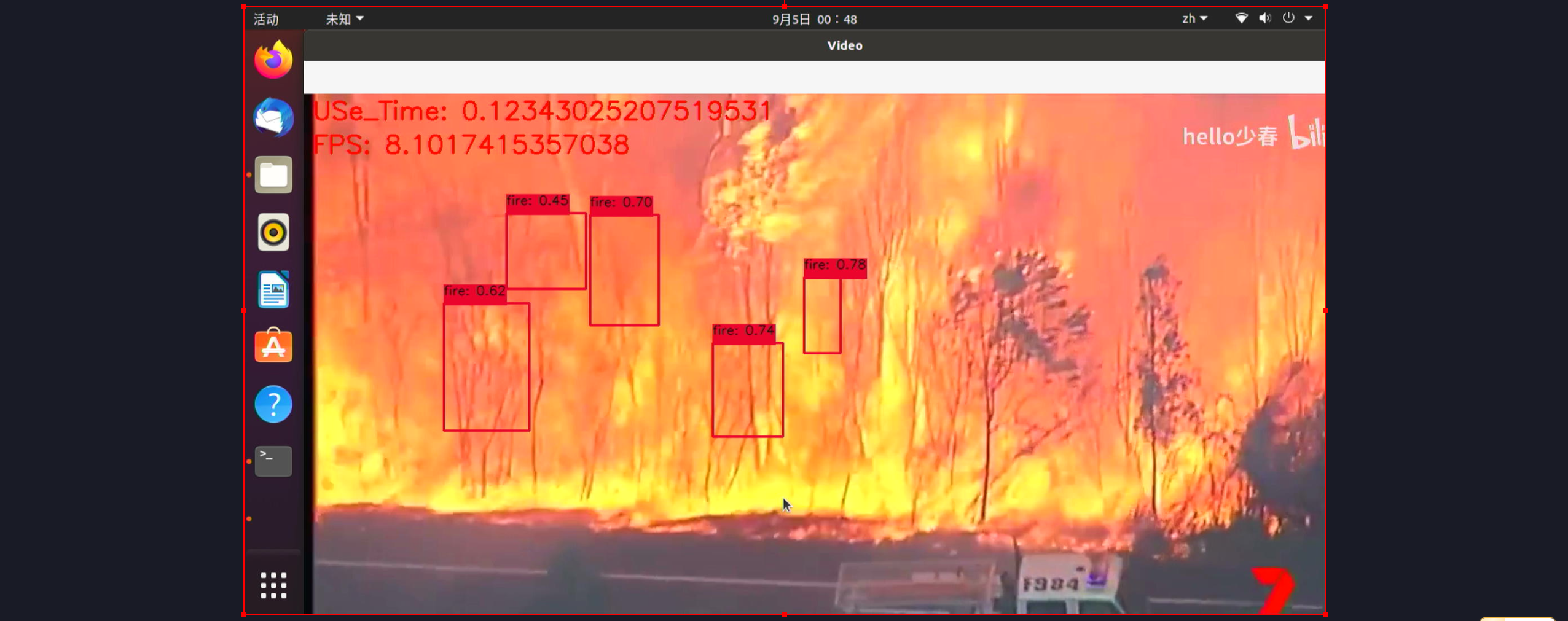
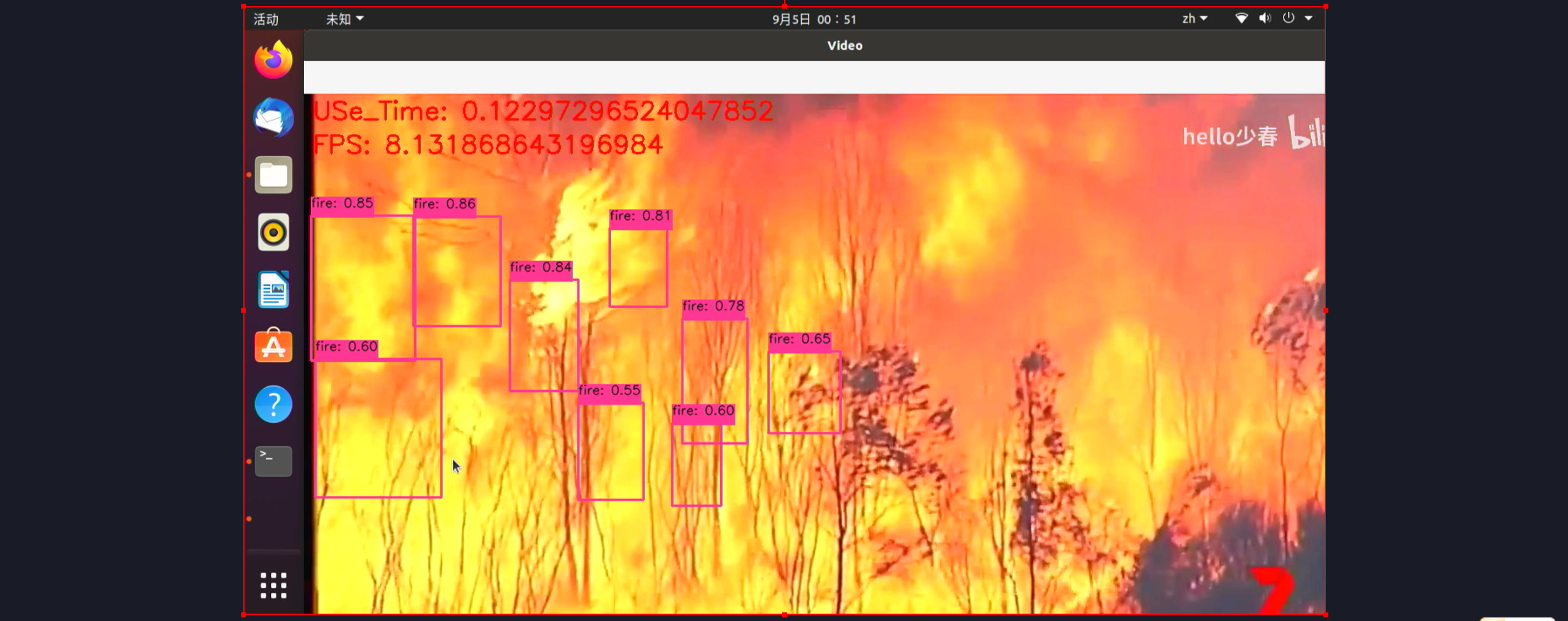
cv2.putText(img, f"FPS: {1/processing_time}", (10, 70), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
cv2.putText(img, f"USe_Time: {processing_time}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)
cv2.imshow('Video', img)
# 如果按下'q'键,退出循环
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# 释放视频捕获对象和关闭窗口
video_capture.release()
cv2.destroyAllWindows()